高専在学時にロボット制作に興味を持ちました.
当時は研究室にあったUnitree Go1を少し触る程度でしたが,卒業を機に本格的な制作(現在は制御がメイン)を始めました.
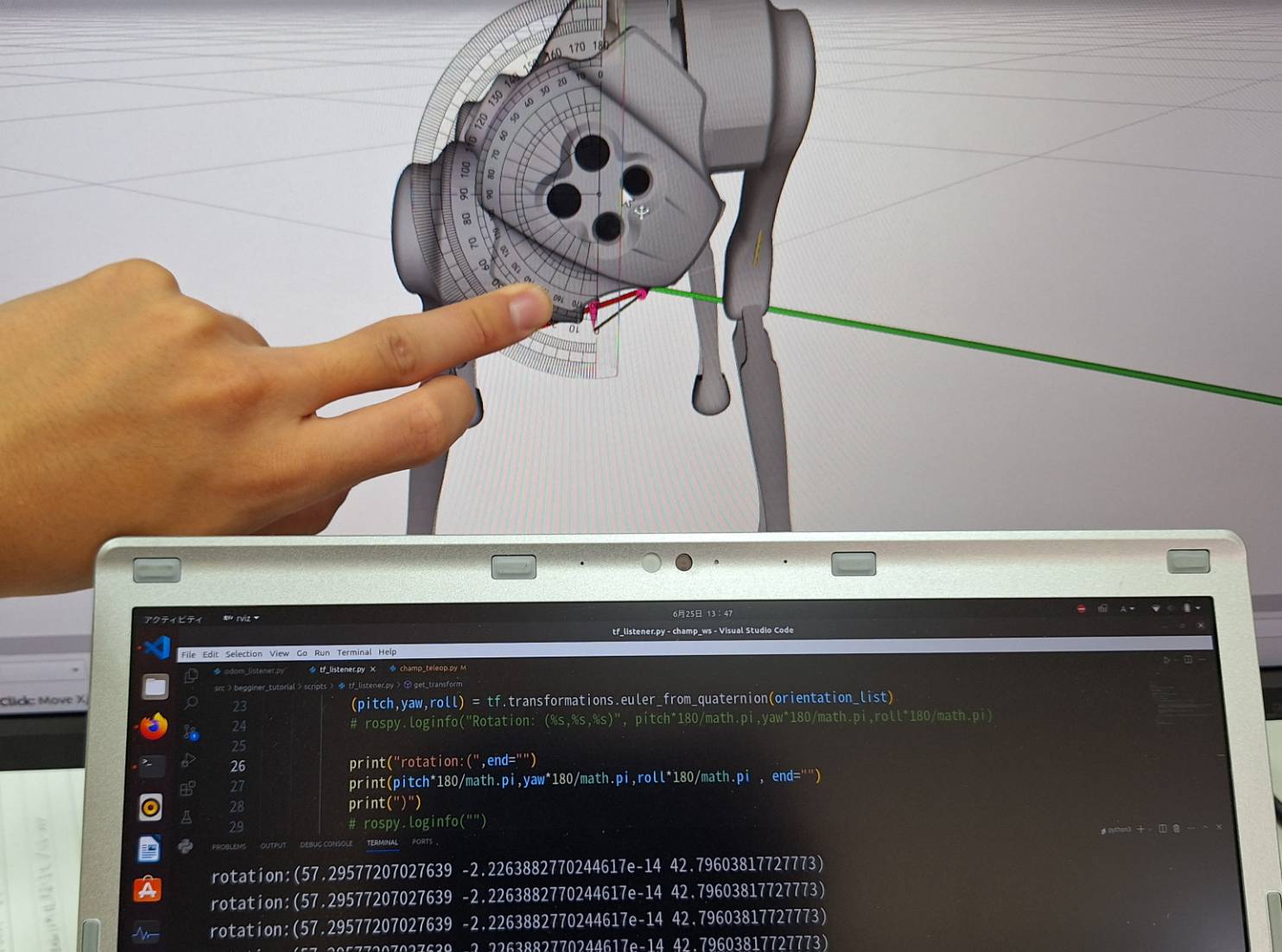
現在はシミュレーション上で逆運動学の計算を完了し,ライブラリを活用して足先軌道の生成まで行いました.
更に不整地に対応するために強化学習を現在学んでいるところです.
詳細はZennにまとめていますのでこちらをご覧ください.
プロダクトの概要
感想
強化学習の難しさに直面しています.
まずはシミュレーション上での学習を進めていきたいと思います.